Hola a todos, este es mi primer post. Me he encontrado con la web de casualidad, haciendo busquedas en el google y he visto que me puedo hacer un hueco en este sofa, que tanto os gusta la musica y el midi  como a mí. Desde hace tiempo estoy aprendiendo a programar pics entorno al midi. Tengo un par de proyectos a medias y poca info de la parte teorica en cuanto al midi, y queria saber si alguien en este foro puede ayudarme con un par de cosillas
como a mí. Desde hace tiempo estoy aprendiendo a programar pics entorno al midi. Tengo un par de proyectos a medias y poca info de la parte teorica en cuanto al midi, y queria saber si alguien en este foro puede ayudarme con un par de cosillas
cuando muevo un pote en el controlador envia una señal llamada control change son tres bytes el de estatus, nº de controlador y valor del mismo, que tiempo entre byte y byte necesita el receptor para asimilar el primer byte y preparase para recibir el siguiente byte y depues el trecero. y si es el mismo tiempo que en dato de SPP que tambien son tres bytes.
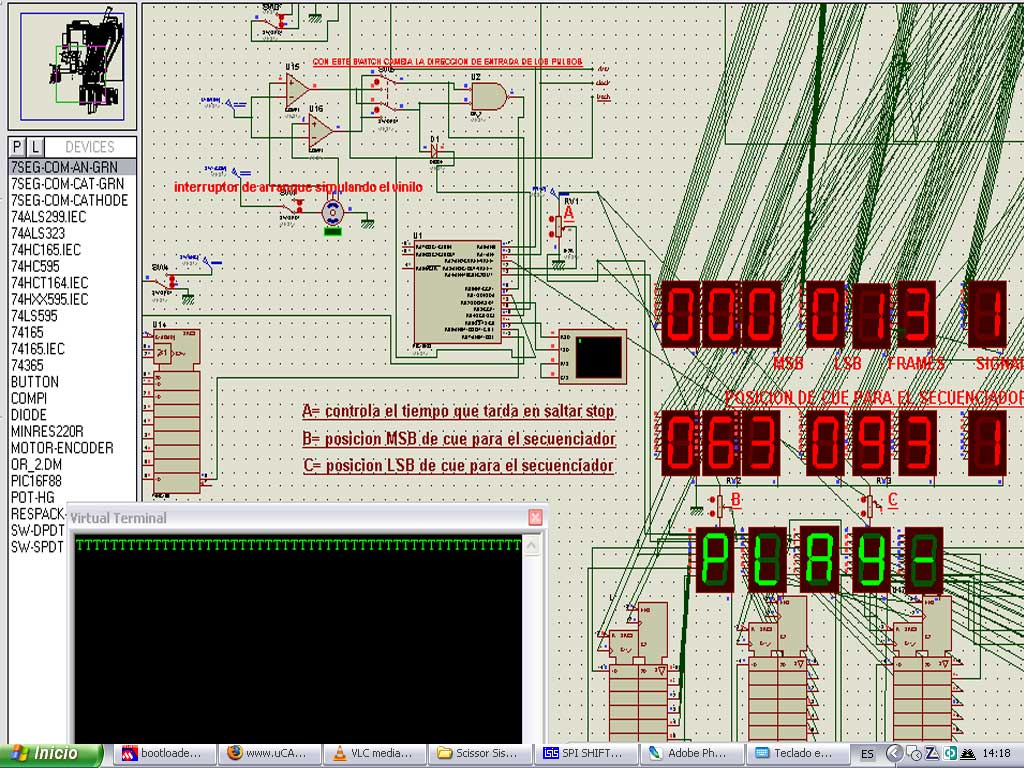
otra pregunta es si el secuenciador esclavo esta andando, envio una señal de stop, seguido de una señal SPP para colocar el secuenciador en otra posicion de comienzo, que tiempo minimo usarian ustedes entre stop y el spp, y el tiempo minimo tras enviar la spp para enviar un continue y que empieze desde ese punto.
les hago estas preguntas porque los programas para pic que estoy haciendo envian un byte tras otro consumiendo el minimo nº de ciclos a 20Mhz que he podido, pensando en un principio que iba a ser muy lento. y ahora el esclavo no puede seguir el ritmo de mi juguete, poniendole un pequeño retraso tras cada envio de la usart funciona, pero queria conocer si hay algun tipo de norma con respecto a los tiempos entre dato y dato para el midi, o si varian los tiempos entre un tipo u otro de dato
otra cosilla queria preguntarles si me podian explicar el flowchart de como hacen para al recibir un dato midi reconocerlo de un tipo u otro y como lo manejan, no se confundan que no les estoy pidiendo lineas de codigo que para eso ya estoy yo , si no una aclaracion de como podria hacerlo o algun link al santo tutogrial de midi
, si no una aclaracion de como podria hacerlo o algun link al santo tutogrial de midi  queria montar una mesa analogica controlada por midi y para ello he de recibir datos y no enviarlos cosa que hasta el momento no sale, cualquier comentario es bueno que seguro me dan una idea de como plantear el programa
queria montar una mesa analogica controlada por midi y para ello he de recibir datos y no enviarlos cosa que hasta el momento no sale, cualquier comentario es bueno que seguro me dan una idea de como plantear el programa
un saludo y gracias
cuando muevo un pote en el controlador envia una señal llamada control change son tres bytes el de estatus, nº de controlador y valor del mismo, que tiempo entre byte y byte necesita el receptor para asimilar el primer byte y preparase para recibir el siguiente byte y depues el trecero. y si es el mismo tiempo que en dato de SPP que tambien son tres bytes.
otra pregunta es si el secuenciador esclavo esta andando, envio una señal de stop, seguido de una señal SPP para colocar el secuenciador en otra posicion de comienzo, que tiempo minimo usarian ustedes entre stop y el spp, y el tiempo minimo tras enviar la spp para enviar un continue y que empieze desde ese punto.
les hago estas preguntas porque los programas para pic que estoy haciendo envian un byte tras otro consumiendo el minimo nº de ciclos a 20Mhz que he podido, pensando en un principio que iba a ser muy lento. y ahora el esclavo no puede seguir el ritmo de mi juguete, poniendole un pequeño retraso tras cada envio de la usart funciona, pero queria conocer si hay algun tipo de norma con respecto a los tiempos entre dato y dato para el midi, o si varian los tiempos entre un tipo u otro de dato
otra cosilla queria preguntarles si me podian explicar el flowchart de como hacen para al recibir un dato midi reconocerlo de un tipo u otro y como lo manejan, no se confundan que no les estoy pidiendo lineas de codigo que para eso ya estoy yo
un saludo y gracias
Responder
Citar